
Chuanruo Ning
I’m a second-year CS PhD student at Cornell University working with Prof. Wei-Chiu Ma and Prof. Kuan Fang. I obtained my bachelor degree from Turing class at Peking University. I’m interested in leveraging 3D information to help robot manipulation. I was fortunate to have worked with Prof. Alan Yuille, Prof. Hao Dong, and Dr. Kaichun Mo.
Research

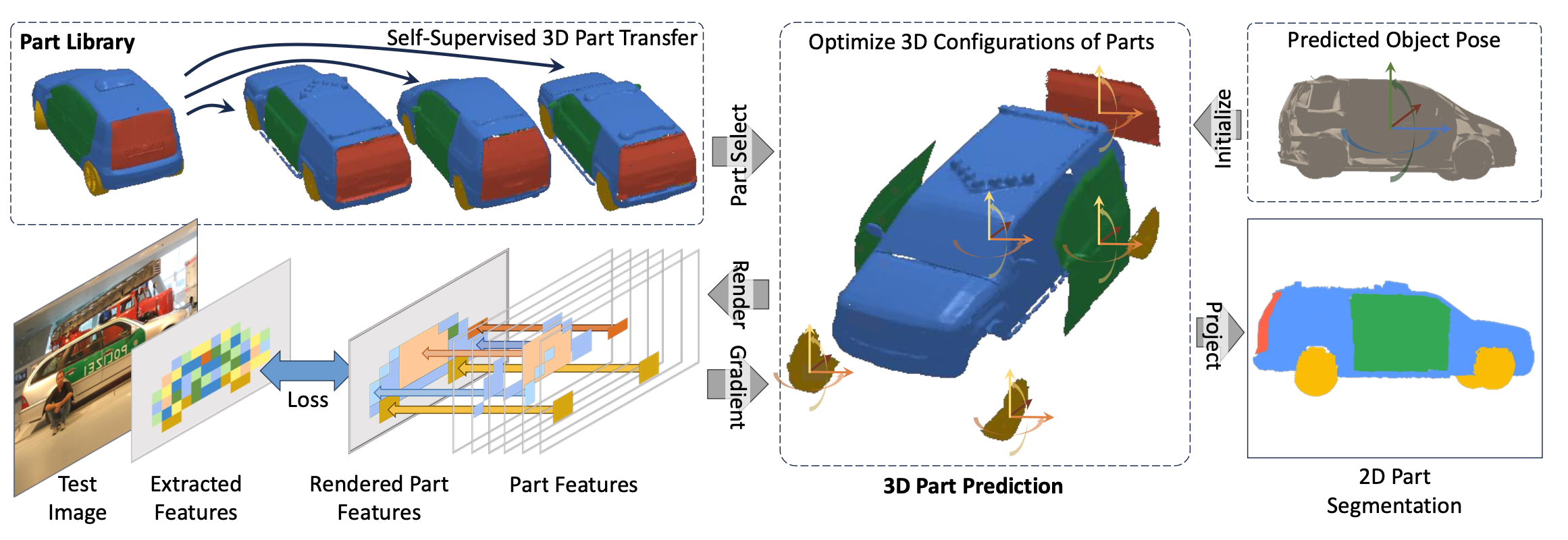
Part321: Recognizing Object Parts in 3D from a 2D Image Using 1-Shot Annotations
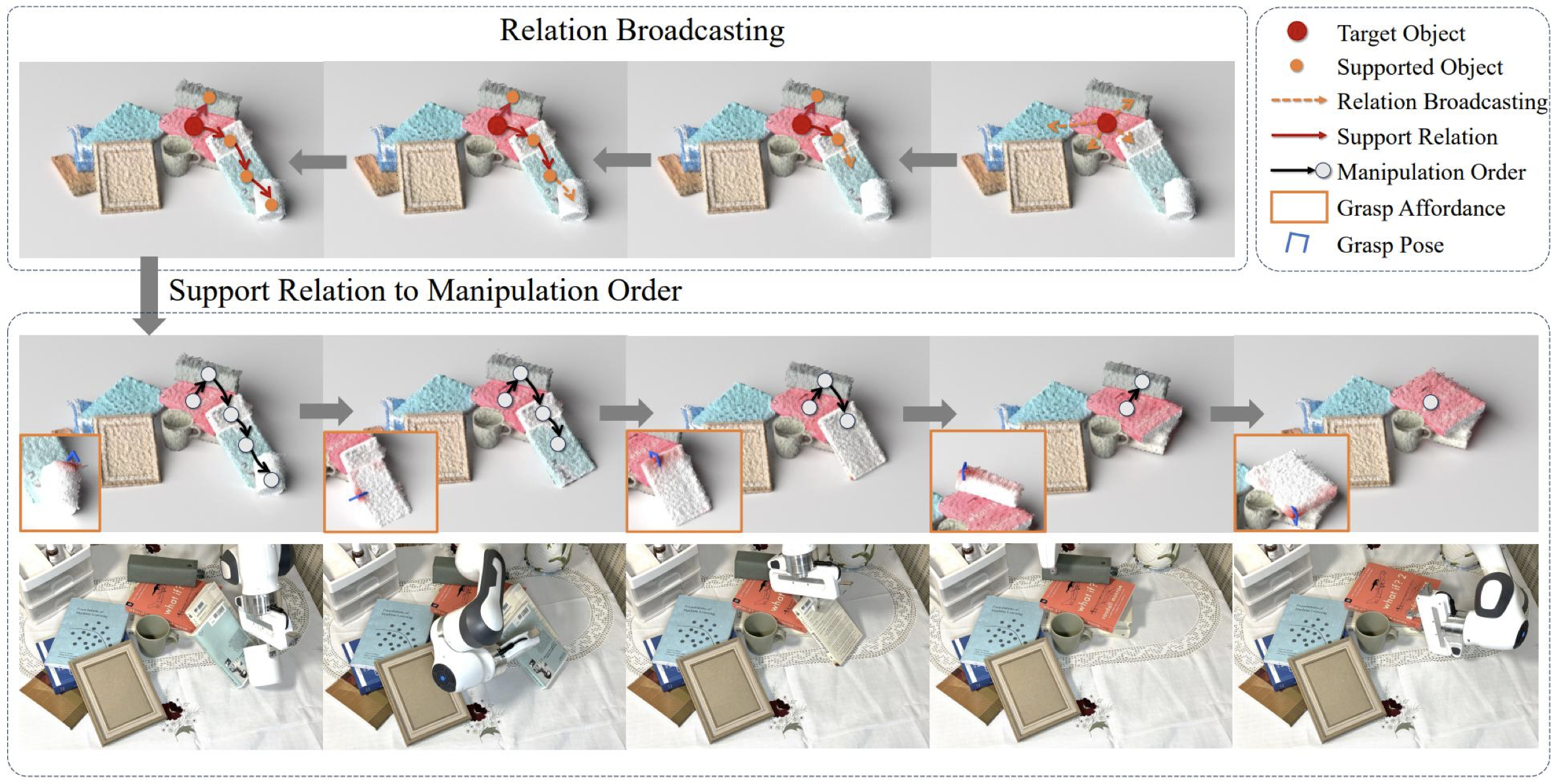
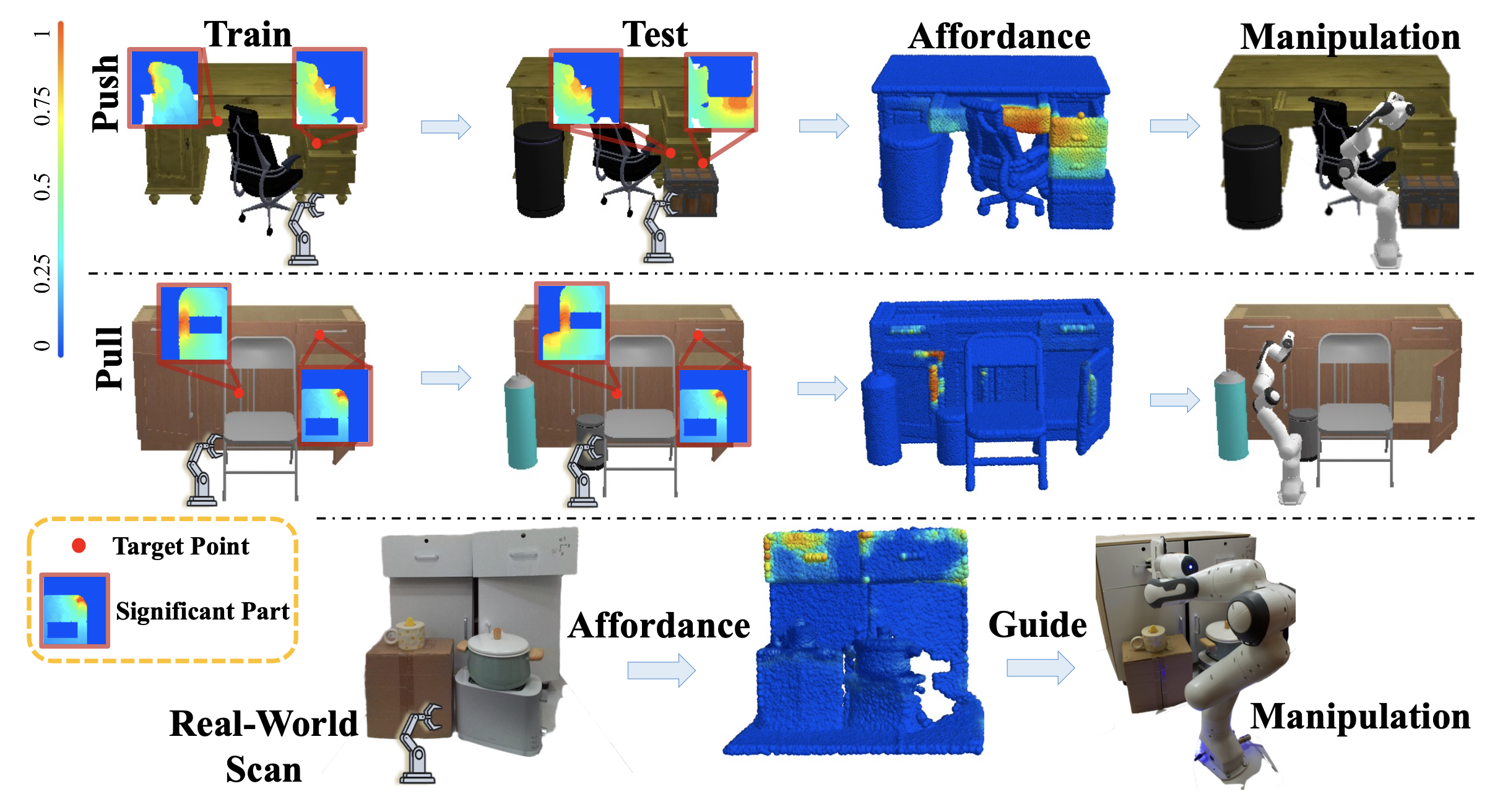
Broadcasting Support Relations Recursively from Local Dynamics for Object Retrieval in Clutters
RSS 2024
Paper Website
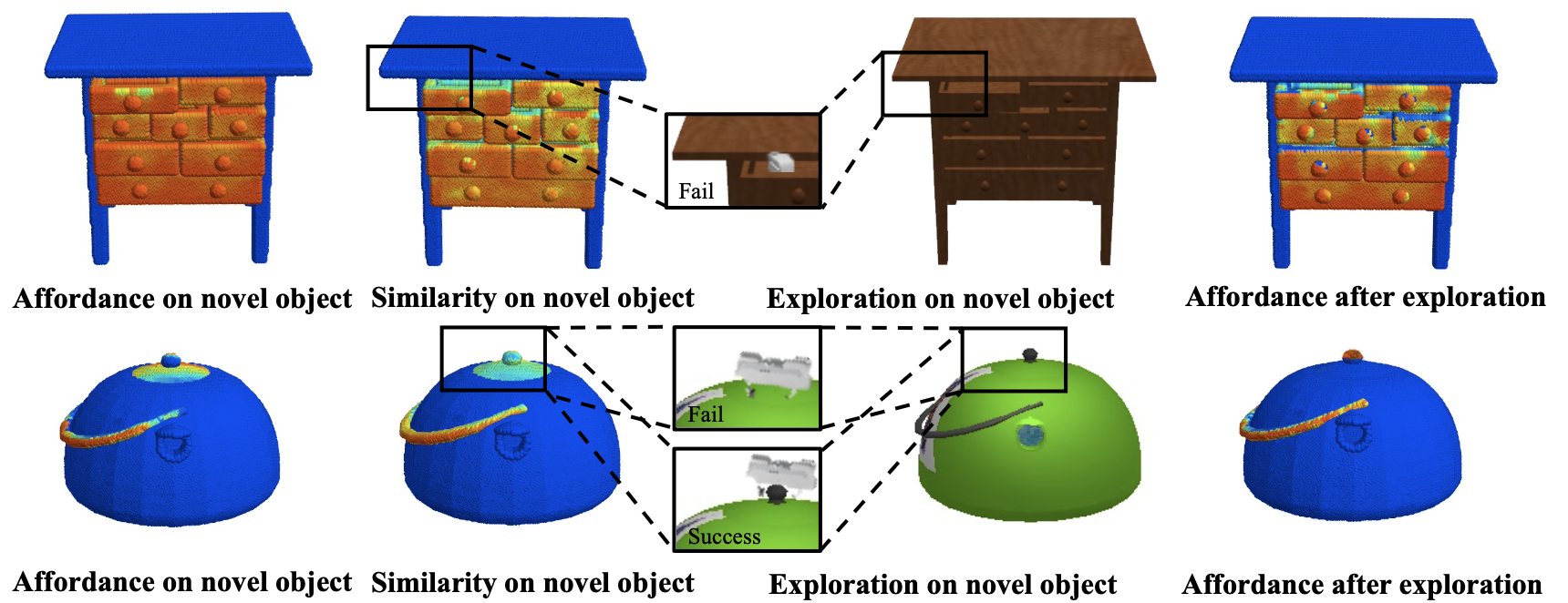
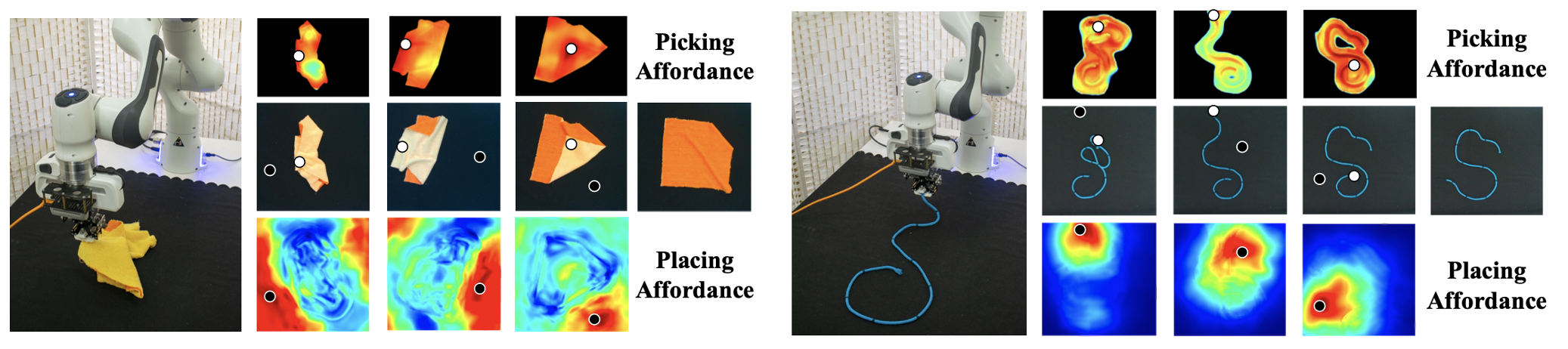
Learning Foresightful Dense Visual Affordance for Deformable Object Manipulation
ICCV 2023
Talks
Title: Part Detection via Render-and-compare Method
Date: 2023-8-18
Location: Malone Hall, Johns Hopkins University, Baltimore, United States
Slides
Title: Occlusion Reasoning for Manipulation
Date: 2022-8-4
Location: Center on Frontiers of Computing Studies, Beijing, China
Slides
Title: In-hand Reorientation
Date: 2022-2-20
Location: Center on Frontiers of Computing Studies, Beijing, China
Slides
Services
- Program Committee: Annual AAAI Conference on Artificial Intelligence (AAAI 2024)
- Reviewer: Conference on Computer Vision and Pattern Recognition (CVPR 2024)
Awards and Honors
- 2023: Huatai Securities Scholarship
- 2023: Peking University Merit Student
- 2022: John Hopcroft Scholarship
- 2022: Peking University Dean’s Scholarship
- 2020: Peking University Freshman Scholarship